
Les déchets marins constituent un problème environnemental majeur, en raison de leurs nombreux impacts sur la faune marine et les écosystèmes. En Europe, près de 626 millions d’objets flottants sont déversés dans la mer chaque année, selon l’European Environment Agency. Même si des mesures ont été mises en place pour les gérer, il reste encore des efforts considérables à faire, surtout ceux qui se trouvent au fond de la mer. C’est dans ce contexte que des chercheurs de la Technical University of Munich (TUM) ont développé, dans le cadre du projet SEACLEAR 2.0 financé par l’Union européenne, un robot de plongée capable de détecter et de récupérer les déchets sous-marins. Ils ont testé son efficacité pour la première fois dans le port de Marseille.
Le concept global du robot de plongée
Dans le cadre de ce projet de collecte de déchets, les chercheurs utilisent un navire de service d’équipage, un drone, un petit robot de recherche sous-marine et un robot de plongée. Selon eux, le navire de service est utilisé pour cartographier le fond marin et alimenter les robots sous-marins en énergie et en données par câble. Le robot de recherche, quant à lui, leur permet de faire des scans plus précis pour identifier les déchets. « Comme nous devons d’abord identifier les déchets et que la manipulation des objets nécessite une grande précision, nous avons installé une caméra et un sonar à bord, permettant une orientation précise même en eau trouble », explique le chercheur Stefan Sosnowki.

Il ajoute qu’une fois les objets identifiés, un système d’intelligence artificielle les convertit en images 3D, un élément essentiel pour déterminer le meilleur point de préhension. Plus de 7 000 images auraient été fournies par les partenaires du projet SEACLEAR 2.0, lors des différentes phases de test. À partir des informations collectées, le robot de plongée entre en jeu pour collecter les déchets identifiés et les amener à la surface.
Une pince robotique à quatre doigts pour saisir les déchets
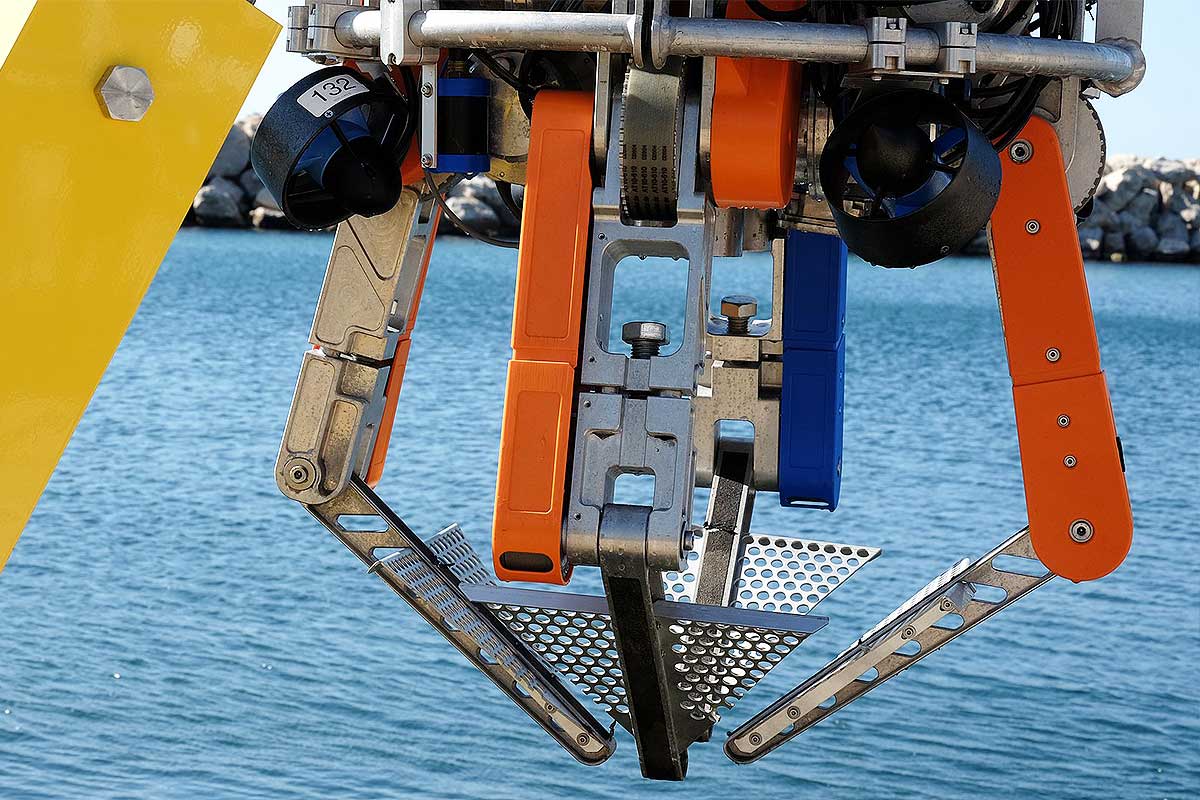
Le robot sous-marin développé par la TUM est doté d’une pince robotique à quatre doigts, pouvant exercer une force de 4 000 newtons et saisir des objets pesant jusqu’à 250 kg. Il est également équipé de capteurs spéciaux destinés à mesurer la force appliquée, entre autres, pour éviter de briser les déchets en verre. Selon les chercheurs, 8 turbines lui permettent de se déplacer sous l’eau et il est relié par un câble. Comme susmentionné, ce dernier assure l’alimentation électrique et la connexion au réseau de données, tout en permettant de remonter plus facilement les objets plus lourds à la surface. L’équipe de recherche affirme avoir choisi de ne pas installer de batterie intégrée qui n’aurait permis qu’une autonomie de deux heures.
Une opération de nettoyage entièrement autonome
Les chercheurs de l’Université technique de Munich indiquent que tout a été pensé pour une opération de nettoyage entièrement autonome. Hormis le câble d’alimentation, de communication et de tirage, ils ont entouré le robot de plongée de 120 kg de mousse de flottabilité, afin de le maintenir en position stable dans l’eau lorsque les turbines s’arrêtent. Celle-ci lui permettrait de se déplacer librement et de maintenir une trajectoire précise. Pour information, le projet SEACLEAR 2.0 est toujours en cours et réunit l’Université technique de Munich, le Fraunhofer CML, la TU Delft, l’Université de Dubrovnik et l’Université technique de Cluj-Napoca.

Les chercheurs se fixent pour objectif de mettre au point des flottes de robots autonomes qui pourront nettoyer efficacement les fonds marins. Plus d’informations sur tum.de. Que pensez-vous de ces robots nettoyeurs de fonds marins ? Je vous invite à nous donner votre avis, vos remarques ou nous remonter une erreur dans le texte, cliquez ici pour publier un commentaire .