
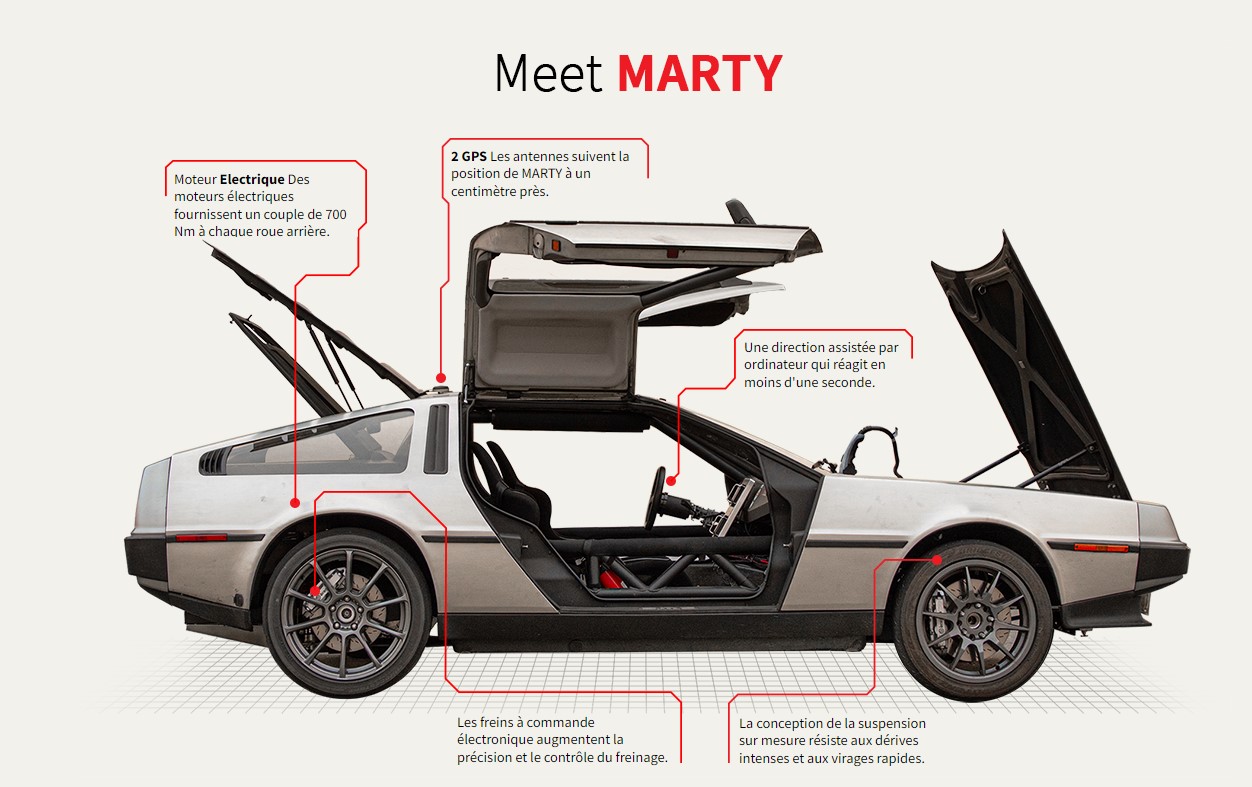
Pour démontrer que les systèmes de conduite autonome peuvent être réellement sûrs s’ils sont bien conçus, les ingénieurs du Dynamic Design Lab de l’université Stanford, aux États-Unis, ont mené un essai inédit sur le circuit Thunderhill Raceway, dans le nord de la Californie. Dans le cadre de l’expérience, l’équipe a transformé une DeLorean de 1981 en une voiture autonome sobrement baptisée MARTY. Comme si cela ne suffisait pas, ils ont remplacé le moteur thermique par deux puissants moteurs installés sur chaque roue arrière du véhicule.
Une DeLorean des années 80
Les chercheurs ont publié sur YouTube une vidéo montrant l’impressionnante capacité de MARTY à déraper tout en surmontant les obstacles posés sur la piste. Selon Jon Goh, diplômé de Stanford, qui a participé au projet, la DeLorean de 1981 rendue autonome peut changer de direction encore plus rapidement que n’importe quel humain utilisant des commandes de direction mécaniques. Effectivement, l’expérience visait à atteindre le même niveau de précision que celui de la conduite d’un humain chevronné en matière de drift. Le logiciel de bord a été conçu pour être en mesure d’apprendre les différents scénarios et contraintes qui peuvent se présenter sur la route.
Améliorer la sécurité des passagers
Le moins qu’on puisse dire, c’est que MARTY gère efficacement les virages. Selon les membres du Dynamic Design Lab de l’université américaine susmentionnée, les technologies comme les leurs pourraient un jour aider à améliorer significativement la précision des voitures autonomes en leur apprenant à éviter des obstacles fixes ou mobiles.
« Nous aimerions développer des véhicules automatisés capables d’utiliser toute la friction entre le pneu et la route pour mettre la voiture hors de danger. Nous voulons que la voiture puisse éviter tout accident évitable dans le cadre des lois de la physique. (…) Nous essayons de développer des véhicules automatisés capables de gérer des manœuvres d’urgence ou des surfaces glissantes comme la glace ou la neige » Chris Gerdes, ingénieur en chef.
Une expérience qui a du sens
Gerdes s’est réjouit des résultats des essais que lui et ses collaborateurs avaient menés. « Les résultats obtenus jusqu’à présent sont plutôt remarquables », a-t-il affirmé, et d’ajouter : « les systèmes de contrôle de la stabilité des voitures modernes limitent le contrôle du conducteur à une plage très étroite du potentiel de la voiture. »

En effet, la manœuvre de dérapage est à l’opposé de ce que les conducteurs effectuent habituellement dans les situations d’urgence, car elle est contraire à la logique. En étudiant cette forme de conduite, les membres du Dynamic Design Lab espèrent pouvoir améliorer significativement la réactivité ainsi que la précision des systèmes de conduite autonome des voitures intelligentes.
